YASKAWA SGMAH Sigma II 0.91A 100W MOTEUR SERVOMOTEUR AC 3000RMP SGMAH-01AAA41-Y1
Spécifications
Fabricant : Yaskawa
Numéro de produit : SGMAH-01AAA41-Y1
Description : SGMAH-01AAA41-Y1 est un servomoteur AC fabriqué par Yaskawa
Type de servomoteur : SGMAH Sigma II
Puissance nominale : 10 W (0,07 CV)
Alimentation : 200 V
Spécifications de l'encodeur : Encodeur incrémental 13 bits (2048 x 4) ; Standard
Niveau de révision : Standard
Spécifications de l'arbre : Arbre droit sans rainure de clavette
Accessoires : Standard ; sans frein
Option : Aucune
Type : aucun
AUTRES PRODUITS SUPÉRIEURS
Moteur Yasakawa, Driver SG- Moteur Mitsubishi HC-,HA-
Modules Westinghouse 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Moteur Fanuc A0-
Transmetteur Rosemount 3051- Transmetteur Yokogawa EJA-
SProduits similaires
SGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2E
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
Les moteurs pas à pas peuvent souvent présenter un phénomène appelé résonance à certaines fréquences de pas. Cela peut se manifester par une perte ou une chute soudaine du couple à certaines vitesses, ce qui peut entraîner des pas manqués ou une perte de synchronisme. Cela se produit lorsque la fréquence des impulsions de pas d'entrée coïncide avec la fréquence d'oscillation naturelle du rotor. Il existe souvent une zone de résonance autour de la région de 100 – 200 pps et également une dans la région de fréquence d'impulsion de pas élevée. Le phénomène de résonance d'un moteur pas à pas provient de sa construction de base et, par conséquent,
il n'est pas possible de l'éliminer complètement. Il dépend également des conditions de charge. Il peut être réduit
en pilotant le moteur en modes demi-pas ou micro-pas.
Lorsqu'une impulsion de pas est appliquée à un moteur pas à pas, le rotor se comporte de la manière définie par la courbe ci-dessus.
Le temps de pas t est le temps qu'il faut à l'arbre du moteur pour effectuer une rotation d'un angle de pas une fois que la première impulsion de pas est appliquée.
Ce temps de pas dépend fortement du rapport couple/inertie (charge) ainsi que du type de pilote utilisé.
Étant donné que le couple est fonction du déplacement, il s'ensuit que l'accélération le sera également. Par conséquent, lors d'un déplacement par grands incréments de pas, un couple élevé est développé et, par conséquent, une accélération élevée. Cela peut provoquer des dépassements et des oscillations comme indiqué. Le temps de stabilisation T est le temps qu'il faut à ces oscillations ou oscillations pour cesser. Dans certaines applications, ce phénomène peut être indésirable. Il est possible de réduire ou d'éliminer ce comportement en micro-pas du moteur pas à pas. Pour plus d'informations sur le micro-pas, veuillez consulter la note sur le micro-pas.


 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!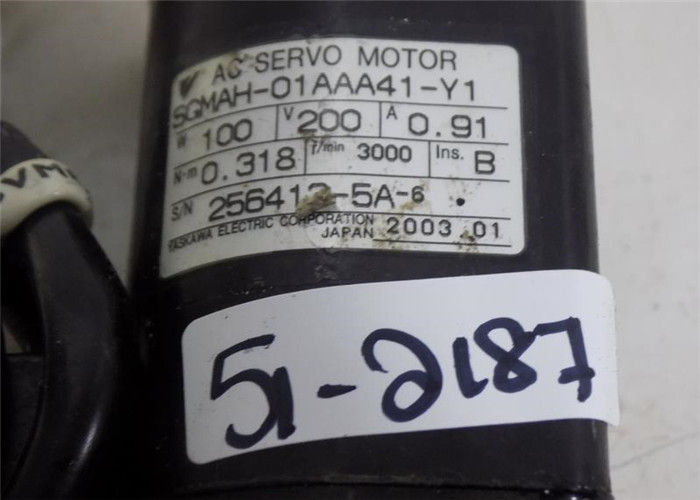
Notation globale
Capture d'écran de notation
Voici la répartition de toutes les évaluations.Toutes les critiques