Sigma industriel de Yaskawa MOTEUR SERVO SGMPH-01A1A41 à C.A. 2 nouveau 100W de série
DESCRIPTION
- Yaskawa électrique
- Moteur servo à C.A.
- Sigma 2 (séries de Σ-II)
SEPCIFICATIONS
| Fabricant |
Yaskawa/MagneTek/Saftronics/Omron |
| Série |
Sigma 2 (séries de Σ-II) |
| Poids |
5KG |
PRODUITS SEMBLABLES
| SGMPH-02A1A-YR12 |
SGMPH-02A1A-YR21 |
| SGMPH-02A1A-YR31 |
SGMPH-02A1A-YR32 |
| SGMPH-02A2A-YR12 |
SGMPH-02A2A-YR21 |
| SGMPH-02AAA2B |
SGMPH-02AAA2C |
| SGMPH-02AAA2E |
SGMPH-02AAA2E |
| SGMPH-02AAA4B |
SGMPH-02AAA61 |
| SGMPH-02BAA21 |
SGMPH-02BAA41 |
| SGMPH-04A1A21 |
SGMPH-02BAAG161 |
| SGMPH-04A1A2B |
SGMPH-04A1A2C |
| SGMPH-04A1A41 |
SGMPH-04A1A4B |
Personne de contact : Anna
Email : wisdomlongkeji@163.com
Téléphone portable : +0086-13534205279
D'AUTRES PRODUITS SUPÉRIEURS
| Moteur de Yasakawa, SG de conducteur |
Moteur HC-, ha de Mitsubishi |
| Modules 1C-, 5X- de Westinghouse |
Emerson VE, kJ |
| Comité technique de Honeywell, TK |
Modules IC de GE - |
| Moteur A0- de Fanuc |
Émetteur EJA- de Yokogawa |
La présence de ce matériel élevé de perméabilité cause le flux magnétique d'être confiné pour la plupart aux chemins défini par la structure de redresseur de la même façon que des courants sont confinés aux conducteurs d'un circuit électronique. Ceci sert à concentrer le flux aux poteaux de redresseur.
Schéma le principe 4. d'un moteur d'aimant de disque développé par Portescap.= N N N N S S S 3
Chemin de flux magnétique du schéma 5. à travers un moteur pas à pas de deux-poteau avec un retard entre le rotor et le redresseur.
Le schéma moteurs pas à pas de blessure unipolaire et bipolaire de 6. la sortie de couple produite par le moteur est proportionnelle à l'intensité du flux magnétique produit quand l'enroulement active.
Les relations de base qui définissent l'intensité du flux magnétique sont définies par :
H = (÷ l de × de N i) où :
N = le nombre de tours de enroulement
I = actuel
H = intensité de champ magnétique
l = longueur de trajet de flux magnétique
Ces relations prouvent que l'intensité de flux magnétique et par conséquent le couple est proportionnelle à
le nombre de tours de enroulement et de l'actuel et inversement proportionnel à la longueur du chemin de flux magnétique.
De ces relations de base on peut voir que le même moteur pas à pas de format de l'image pourrait avoir des capacités très différentes de sortie de couple simplement en changeant les paramètres de enroulement. Plus d'informations détaillées sur la façon dont les paramètres de enroulement affecter la capacité de sortie du moteur peuvent être trouvés dans la note d'application intitulée « des fondements de circuit d'entraînement ».
Éléments de configuration
(a) le contrôleur de The de contrôleur est l'hôte de réseau de SynqNet. Il devrait seulement y avoir un contrôleur par réseau.
(b) les noeuds un noeud est un esclave et pas le contrôleur, sauf indication contraire.
(c) terminateur un connecteur facultatif de réalimentation placé à l'extrémité d'une chaîne de noeud dans une topologie de ficelle.
Topologie
SynqNet soutient une topologie d'anneau où les noeuds de réseau sont reliés en série de nouveau au contrôleur de SynqNet. Dans une topologie d'anneau, si n'importe quel un câble ou noeud échoue, le réseau réorientera des données du paquet autour de la coupure et informera l'application avec un événement. L'emplacement de la coupure peut être déterminé par l'application.
La topologie de ficelle (ouverte ou terminée) est également soutenue où les noeuds de réseau ne sont pas reliés de nouveau au contrôleur de SynqNet. Si un câble se casse, les noeuds en aval de la coupure ne pourront plus aux paquets émetteurs-récepteurs à/de le contrôleur. L'avantage d'utiliser un terminateur sur le dernier noeud est que le temps d'initialisation de réseau est réduit, parce que le contrôleur peut de manière déterministe trouver le dernier noeud sur un réseau. Les deux types de topologie de ficelle ne soutiennent pas la récupération de défaut.
Des réponses cycliques toutes les réponses cycliques sont reçues chaque cycle opératoire et sont disponibles dans le tampon de réponse de noeud.
(1) expositions prêtes d'entraînement que les communications sont en activité. Valide à tout moment.
(2) expositions prêtes d'encodeur que l'encodeur périodique communique correctement en mode synchrone. Valide quand la réponse prête d'entraînement apparaît.
(3) l'ampère a actionné des expositions que la tension de moteur est disponible pour conduire le servo. Valide quand la réponse prête d'entraînement apparaît.
(4) servo SUR des expositions que le servo est permis ou handicapé. Ne sera pas placé si la commande est handicapée non plus en tournant le PWM outre ou par du freinage dynamique. Valide quand la commande préparent est placé.
(5) la limite de couple prouve que la référence de couple est au-dessus de la limite de couple. Valide quand la réponse prête d'entraînement apparaît.
(6) l'avertissement avertit que des précautions doivent être prises pour empêcher un défaut ou une erreur. Valide à tout moment.
(7) le défaut prouve qu'un défaut a arrêté l'amplificateur. Pour déterminer la cause de défaut, le code d'erreur doit être lu utilisant une opération de mémoire. Valide à tout moment.
(8) le retour de position renvoie une valeur à 32 bits de position à chaque cycle opératoire.
(9) Monitor_A/couple Echo Shows que la valeur de serrage à chaque cycle opératoire est retournée.
(10) Monitor_C/données multitours renvoie une valeur de données multitours de 16 bits.


 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!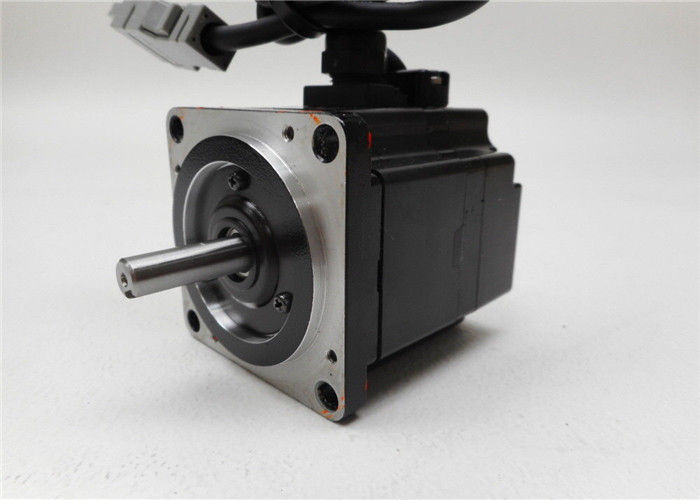
Notation globale
Capture d'écran de notation
Voici la répartition de toutes les évaluations.Toutes les critiques