Servomoteur industriel 23.6A Yaskawa 2900W AC SERVO 2900W SGMRV-30ANA-YR21
Caractéristiques
Courant : 23,6 A
Tension : 200 V
Puissance :2900W
Vitesse max : 1500 tr/min
Encodeur : encodeur absolu 17 bits
Inertie de charge JL kg¡m2¢ 10−4 : 0,026
Arbre : droit sans clavette
AUTRES PRODUITS SUPÉRIEURS
| Moteur Yasakawa, Pilote SG- |
Mitsubishi Motor HC-, HA- |
| Modules Westinghouse 1C-, 5X- |
Emerson VE-,KJ- |
| Honeywell TC-, TK- |
CI Modules GE - |
| Moteur Fanuc A0- |
Emetteur Yokogawa EJA- |
Personne à contacter : Anne
Courriel : sagesselongkeji@163.com
Téléphone portable : +0086-13534205279
PRODUITS SIMILAIRES
SGMRV-05ANA-YR11
SGMRV-05ANA-YR21
SGMRV-09ANA-YR11
SGMRV-13ANA-YR1A
SGMRV-13ANA-YR21
SGMRV-13ANA-YR31
SGMRV-20ANA-YR11
SGMRV-30ANA-YR12
SGMRV-30ANA-YR21
SGMRV-37ANA-YR12
1. Selon le type d'alimentation de travail : peut être divisé en moteur à courant continu et moteur à courant alternatif.1) Le moteur à courant continu peut être divisé en moteur à courant continu sans balais et moteur à courant continu sans balais selon la structure et le principe de fonctionnement.Le moteur à courant continu à balais peut être divisé en moteur à courant continu à aimant permanent et moteur à courant continu électromagnétique.Division du moteur à courant continu électromagnétique : moteur à courant continu à excitation série, moteur à courant continu shunt, autre moteur à courant continu à excitation et moteur à courant continu à excitation composée.Moteur à courant continu à aimant permanent: moteur à courant continu à aimant permanent de terres rares, moteur à courant continu à aimant permanent en ferrite et moteur à courant continu à aimant permanent en aluminium nickel cobalt.2) Le moteur à courant alternatif peut également être divisé en moteur monophasé et moteur triphasé.deux.Selon la structure et le principe de fonctionnement, il peut être divisé en moteur à courant continu, moteur asynchrone, moteur synchrone.1) le moteur synchrone peut être divisé en moteur synchrone à aimant permanent, moteur synchrone à réluctance et moteur synchrone hystérétique.2) Le moteur asynchrone peut être divisé en moteur à induction et moteur à courant alternatif.Le moteur à induction peut être divisé en moteur asynchrone triphasé, moteur asynchrone monophasé et moteur asynchrone à pôles de couverture.Le moteur à collecteur AC peut être divisé en moteur d'excitation série monophasé, moteur à double usage AC/DC et moteur répulsif.3. Selon le mode de démarrage et de fonctionnement, il peut être divisé en moteur asynchrone monophasé à démarrage capacitif, moteur asynchrone monophasé à démarrage capacitif, moteur asynchrone monophasé à démarrage capacitif et moteur asynchrone monophasé à phase divisée.(y compris diverses petites machines-outils, petites machines, dispositifs médicaux, instruments électroniques, etc.).2) le moteur de commande est en outre divisé en un moteur pas à pas et un servomoteur, et similaire.5. Selon la structure du rotor, le moteur à induction à cage (l'ancienne norme est appelée moteur asynchrone à cage d'écureuil) et un moteur à induction à rotor bobiné (l'ancienne norme est appelée moteur asynchrone à bobinage).6. La vitesse de fonctionnement peut être divisée en moteur à grande vitesse, moteur à basse vitesse, moteur à vitesse constante et moteur à régulation de vitesse.Le moteur à basse vitesse est divisé en un moteur à réduction de vitesse, un moteur à réduction de vitesse électromagnétique, un moteur couple, un moteur synchrone à pôles à griffes, etc.Le moteur à régulation de vitesse peut être divisé en un moteur à vitesse constante de classe classe, un moteur à vitesse constante à variation continue, un moteur à changement de vitesse étagé et un moteur à vitesse variable en continu, et peut être divisé en un moteur à régulation de vitesse électromagnétique moteur, un moteur de régulation de vitesse à courant continu, un moteur de régulation de vitesse à fréquence variable PWM et un moteur de régulation de vitesse à réluctance commutée

 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!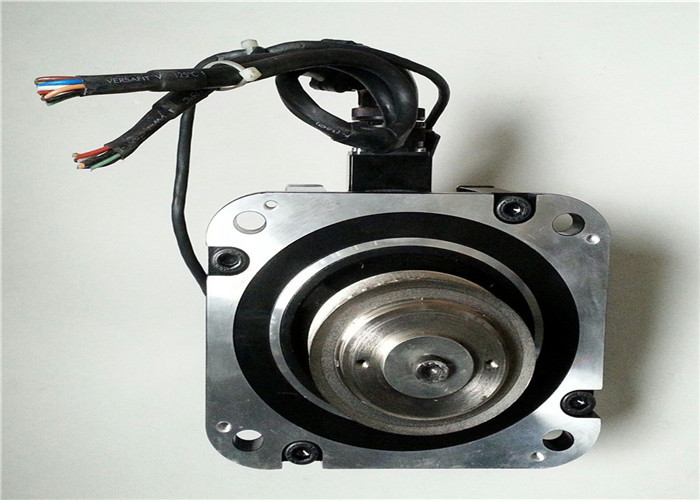
Notation globale
Capture d'écran de notation
Voici la répartition de toutes les évaluations.Toutes les critiques