Servomoteur industriel Yaskawa Electric 4500 W 1500 RPM SERVO MOTOR SGMDH-45A2B-YR14
DÉTAILS RAPIDES
Modèle SGMDH-45A2B-YR14
Type de produit Servomoteur AC
Puissance nominale 4500w
Couple nominal 28,4 Nm
Vitesse nominale 1500RPM
Tension d'alimentation 200vAC
Courant nominal 32,4 Ampères
AUTRES PRODUITS SUPÉRIEURS
Moteur Yasakawa, Driver SG- Moteur Mitsubishi HC-,HA-
Modules Westinghouse 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Moteur Fanuc A0-
Transmetteur Rosemount 3051- Transmetteur Yokogawa EJA-
PRODUITS SIMILAIRES
| SGMDH |
description |
fabricant |
| SGMDH-056A2A-YR25 |
SGMDH056A2AYR25 SERVO MOTEUR |
yaskawa |
| SGMDH-06A2 |
SGMDH06A2 SERVO MOTEUR |
yaskawa |
| SGMDH-06A2A-TR25 |
SGMDH06A2ATR25 SERVO MOTEUR |
yaskawa |
| SGMDH-06A2A-YR |
SGMDH06A2AYR SERVO MOTEUR |
yaskawa |
| SGMDH-06A2A-YR11 |
SGMDH06A2AYR11 SERVO MOTEUR |
yaskawa |
| SGMDH-06A2A-YR12 |
SGMDH06A2AYR12 SERVO MOTEUR |
yaskawa |
| SGMDH-06A2A-YR13 |
SGMDH06A2AYR13 SERVO MOTEUR |
yaskawa |
| SGMDH-06A2A-YR14 |
SGMDH06A2AYR14 SERVO MOTEUR |
yaskawa |
| SGMDH-06A2A-YR24 |
SGMDH06A2AYR24 SERVO MOTEUR |
yaskawa |
| SGMDH-06A2A-YR25 |
SGMDH06A2AYR25 SERVO MOTEUR |
yaskawa |
| SGMDH-06A2A-YR26 |
SGMDH06A2AYR26 2.63NM 550W 4AMP 2000RPM 200V |
yaskawa |
| SGMDH-12A2 |
SGMDH12A2 SERVO MOTEUR |
yaskawa |
| SGMDH-12A2A-YA14 |
SGMDH12A2AYA14 SERVO MOTEUR |
yaskawa |
| SGMDH-12A2A-YR |
SGMDH12A2AYR SERVO MOTEUR |
yaskawa |
| SGMDH-12A2A-YR12 |
SGMDH12A2AYR12 SERVO MOTEUR |
yaskawa |
| SGMDH-12A2A-YR13 |
SGMDH12A2AYR13 AC 2000RPM 1150W 200V 7.3AMP 5.49NM |
yaskawa |
| SGMDH-12A2A-YR14 |
SGMDH12A2AYR14 SERVO MOTEUR |
yaskawa |
| SGMDH-12A2A-YR15 |
SGMDH12A2AYR15 SERVO MOTEUR |
yaskawa |
| SGMDH-12A2A-YR21 |
SGMDH12A2AYR21 SERVO MOTEUR |
yaskawa |
| SGMDH-12A2A-YRA1 |
SGMDH12A2AYRA1 SERVO MOTEUR |
yaskawa |
| SGMDH-13A2A-YR23 |
SGMDH13A2AYR23 SERVO MOTEUR |
yaskawa |
| SGMDH-20A2A21 |
SGMDH20A2A21 SERVO MOTEUR |
yaskawa |
| SGMDH-22A2 |
SGMDH22A2 SERVO MOTEUR |
yaskawa |
| SGMDH-22A2A-YR11 |
SGMDH22A2AYR11 SIGMA II 2.2KW L/U AXIS SK45X |
yaskawa |
| SGMDH-22A2A-YR12 |
SGMDH22A2AYR12 SERVO MOTEUR |
yaskawa |
| SGMDH-22A2A-YR13 |
SGMDH22A2AYR13 SERVO MOTEUR |
yaskawa |
| SGMDH-22A2A-YR13YA |
SGMDH22A2AYR13YA SERVO MOTEUR |
yaskawa |
| SGMDH-22A2A-YR14 |
SGMDH22A2AYR14 SERVO MOTEUR |
yaskawa |
| SGMDH-22A2A-YR32 |
SGMDH22A2AYR32 SERVO MOTEUR |
yaskawa |
| SGMDH-22ACA61 |
SGMDH22ACA61 SERVO MOTEUR |
yaskawa |
| SGMDH-30A2A-YR31 |
SGMDH30A2AYR31 SERVO MOTEUR |
yaskawa |
| SGMDH-30A2A-YR32 |
SGMDH30A2AYR32 SERVO MOTEUR |
yaskawa |
| SGMDH-32A2 |
SGMDH32A2 SERVO MOTEUR |
yaskawa |
| SGMDH-32A2A |
SGMDH32A2A SERVO MOTEUR |
yaskawa |
| SGMDH-32A2A-YA14 |
SGMDH32A2AYA14 SERVO MOTEUR |
yaskawa |
| SGMDH-32A2A-YR11 |
SGMDH32A2AYR11 SERVO MOTEUR |
yaskawa |
| SGMDH-32A2A-YR12 |
SGMDH32A2AYR12 SERVO MOTEUR |
yaskawa |
| SGMDH-32A2A-YR13 |
SGMDH32A2AYR13 AC 3.2KW SIGMA 2 S-AXIS |
yaskawa |
| SGMDH-32A2A-YR14 |
SGMDH32A2AYR14 SERVO MOTEUR |
yaskawa |
| SGMDH-32A2A-YR51 |
SGMDH32A2AYR51 SERVO MOTEUR |
yaskawa |
| SGMDH-32A2A-YRA1 |
SGMDH32A2AYRA1 SERVO MOTEUR |
yaskawa |
| SGMDH-32ACA-MK11 |
SGMDH32ACAMK11 SERVO MOTEUR |
yaskawa |
| SGMDH-32P5A |
SGMDH32P5A SERVO MOTEUR |
yaskawa |
| SGMDH-40A2 |
SGMDH40A2 SERVO MOTEUR |
yaskawa |
| SGMDH-40A2A |
SGMDH40A2A SERVO MOTEUR |
yaskawa |
| SGMDH-40ACA21 |
SGMDH40ACA21 SERVO MOTEUR |
yaskawa |
| SGMDH-44A2A-YR14 |
SGMDH44A2AYR14 SERVO MOTEUR |
yaskawa |
| SGMDH-44A2A-YR15 |
SGMDH44A2AYR15 SERVO MOTEUR |
yaskawa |
| SGMDH-45A2A6C |
SGMDH45A2A6C SERVO MOTEUR |
yaskawa |
| SGMDH-45A2B61 |
SGMDH45A2B61 SERVO MOTEUR |
yaskawa |
| SGMDH-45A2BYR |
SGMDH45A2BYR SERVO MOTEUR |
yaskawa |
| SGMDH-45A2B-YR13 |
SGMDH45A2BYR13 SERVO MOTEUR |
yaskawa |
| SGMDH-45A2BYR14 |
SGMDH45A2BYR14 SERVO MOTEUR |
yaskawa |
| SGMDH-45A2B-YR14 |
SGMDH45A2BYR14 SERVO MOTEUR |
yaskawa |
| SGMDH-45A2BYR15 |
SGMDH45A2BYR15 SERVO MOTEUR |
yaskawa |
| SGMDH-45A2B-YR15 |
SGMDH45A2BYR15 SERVO MOTEUR |
yaskawa |
| SGMDH-6A2A-YR13 |
SGMDH6A2AYR13 SERVO MOTEUR |
yaskawa |
| SGMDH-6A2A-YR25 |
SGMDH6A2AYR25 SERVO MOTEUR |
yaskawa |
| SGMDH-A2 |
SGMDHA2 SERVO MOTEUR |
yaskawa |
| SGMDH-A2A |
SGMDHA2A SERVO MOTEUR |
yaskawa |
• En fermant la boucle de vitesse ainsi que la boucle de position dans l'ordinateur, un seul dispositif de rétroaction peut être utilisé pour les deux. L'approche par ordinateur par axe est bénéfique si des taux de mise à jour très élevés sont choisis pour la boucle de vitesse. Avec plusieurs axes, la charge sur un ordinateur central peut être trop importante avec des boucles de vitesse à mise à jour élevée.
• Si beaucoup de mouvements coordonnés sont anticipés, un ordinateur central aurait un accès direct à chaque axe. Avec l'approche par ordinateur par axe, les liaisons de communication d'ordinateur à ordinateur entraînent des retards qui limitent une coordination étroite. Les boucles de vitesse peuvent rester analogiques avec l'approche de l'ordinateur central pour faciliter cela.
Un diagramme de Bode, comme celui illustré ci-dessous, permet de quantifier la qualité avec laquelle la sortie, ou rétroaction (F), suit la commande (C) en montrant la relation entre A et la fréquence d'excitation. La fréquence est normalement exprimée en radians/sec.(ω) plutôt qu'en cycles par seconde (f). Puisque ω = 2πf ≈ 6,28 f, il est facile de convertir de l'un à l'autre. De plus, 1/ω, en secondes, est la constante de temps d'un filtre passe-bas avec une bande passante de f. Une fois que nous connaissons la bande passante (ω) d'un servo, nous connaissons la constante de temps du filtre équivalent (1/ω) et pouvons ainsi prédire sa réponse à une entrée en échelon.
À quoi servent les moteurs pas à pas ?
Positionnement – Puisque les pas à pas se déplacent par pas précis et reproductibles, ils excellent dans les applications nécessitant un positionnement précis
positionnement tel que les imprimantes 3D, les CNC, les plateformes de caméra et les traceurs X,Y. Certains lecteurs de disques utilisent également des moteurs pas à pas pour positionner la tête de lecture/écriture.
Contrôle de la vitesse – Des incréments précis de mouvement permettent également un excellent contrôle de la vitesse de rotation pour
l'automatisation des processus et la robotique.
Couple à basse vitesse - Les moteurs CC normaux n'ont pas beaucoup de couple à basse vitesse. Un moteur pas à pas a
un couple maximal à basse vitesse, ils sont donc un bon choix pour les applications nécessitant une basse vitesse avec une grande
précision.
De nombreux utilisateurs de contrôle de mouvement ont entendu des fournisseurs tenter d'expliquer certaines caractéristiques des servos en utilisant des diagrammes de Bode. Une compréhension de base de ceux-ci est nécessaire pour traiter le mouvement. Pour commencer, la prononciation correcte est "Bo-dee". Pensez simplement à Bo Derek (ce qui n'est pas difficile à faire). Vous trouverez d'autres similitudes entre les deux (à qui je veux faire croire ?) comme le chiffre 10, comme on le verra.

 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!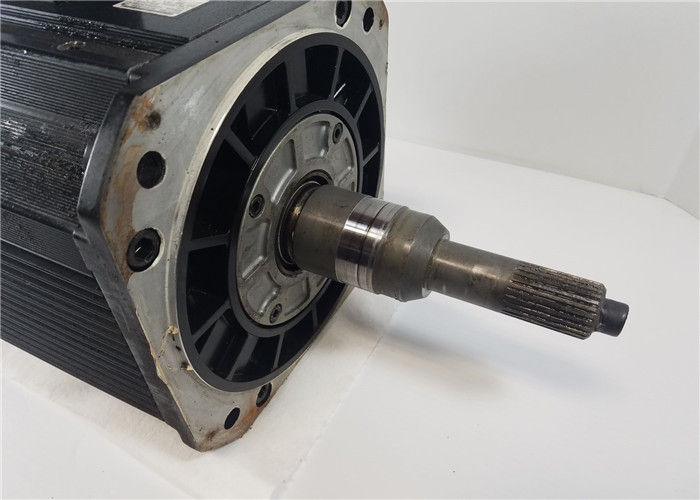
Notation globale
Capture d'écran de notation
Voici la répartition de toutes les évaluations.Toutes les critiques