Servomoteur AC industriel Yaskawa Electric 0.91A 200V Japon SGMAH-02A1A6C
Caractéristiques de l'article
Modèle SGMAH-02A1A6C
Type de produit : Servomoteur AC
Puissance nominale : 100 W
Couple nominal : 0,318 Nm
Vitesse nominale : 3000 tr/min
Tension d'alimentation : 200 V CA
Courant nominal : 0,91 Ampères
AUTRES PRODUITS SUPÉRIEURS
Moteur Yaskawa, Driver SG- Moteur Mitsubishi HC-,HA-
Modules Westinghouse 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Moteur Fanuc A0-
Transmetteur Rosemount 3051- Transmetteur Yokogawa EJA-
Personne de contact : Anna
E-mail : wisdomlongkeji@163.com
Téléphone portable : +0086-13534205279
PRODUITS SIMILAIRES
SGMPH-15AAA21 SGMPH-15A1A-YR11 USAPEM-07YR23 SGM-01U3B4L
SGM-08A314S SGMAH-A3A1A4S SGMAH-02A1A4C SGMAS-01A2A41
SGMAH-A6AAA21 SGM-02VGNK13 SGMAS-A5ACA2C SGMAS-01ACA2C
SGMAS-02ACA21 SGMG-09A2A SGME-01AF14 SGM-01A314
SGMAH-01BAA4C SGM-02B314 SGMAS-06ACA2C SGMAS-07ARB-AB11
SGMAH-08A1A21 SGMG-05A2A SGMG-20A2AB SGMG-20A2A
SGMP-02B314C SGMPH-04AAA21 SGMAS-04A2A-FJ13 SGM-02U3B4L
SGM-02A314 SGMSH-20ACA21 SGMPH-15AAA-TE21 SGMPH-01AAE4CD
SGM-01AWSU12 SGM-01AGSU11 SGME-01AF14 SGM-02AGSU11
SGMP-04U314M SGMAH-04AAA-FJ12 USAREM-02CF2 USAREM-08FJ11
SGMGH-05ACA21 SGM-02U3B2L USASEM-18YR24 SGMAH-04AAAH761
SGMMJ-A3BABA1 SGMP-01U314CM SGM-01BX SGM-A3AFJ71 USAREM-02CE2KX
SGMS-55ASA SGMPH-01AAE-YA11 SGM-08AWFJ83 SGM-08AWFJ83X
SGMG-09AWAAB SGMS-15AWA-HG13 SGMG-05AWAAB SGMP-15AW16DP
USAREM-03DE2USAQEM-03-SU21 USAQEM-A6-SU31 USAQEM-05AA2KX USADEM-13-NT25
SGMP-04AS14 SGML-04AF12C SGMP-04A314E SGMPH-04A1E-TM21
SGME-04AF12 UGTMEM-03LSK21 SGM-02A612B SGMAH-A5A1A41
SGMPH-08AAA21 SGMSH-20ACA-FJ12
SGM-A5A312 SGM-A3A314 SGM-A3A321 SGMSH-15A2A21
USAREM-02CE2 SGM-02A5FJ12 SGMSH-08A1A4D SGM-08A312P
SGM-01B312 SGMAS-01A2A-AD11 SGMp-04AAA21
SGMAH-02A1F-AP11 SGMAH-A5AAA41 USAREM-03BE2KX SGMG-1AA2ABC
SGMGH-55DCA6C SGMG-30ASA SGMG-20VSAA3 SGMG-05AWAD SGMG-09ASA
SGMG-20VSR SGMG-09V2RC3 SGMG-20AWAA3 SGMG-30V2AAB SGMKS-20A3A21X2
Le servomoteur est composé de trois éléments : un moteur, un codeur et un driver. Le driver compare la commande de positionnement et les informations de position/vitesse provenant du codeur et contrôle le courant d'entraînement. Le servomoteur détecte toujours l'état du moteur grâce aux informations de positionnement/vitesse provenant du codeur.
Même si le moteur s'arrête, le servomoteur envoie le signal d'alarme au contrôleur afin que vous puissiez détecter les anomalies. Le servomoteur doit ajuster les paramètres de type de contrôle en fonction de la rigidité du mécanisme et des conditions de charge, cependant, le réglage automatique en temps réel a facilité l'ajustement ces dernières années.

La largeur d'impulsion envoyée au servo varie comme suit :
Minimum : 1 milliseconde ---> Correspond à un angle de rotation de 0 degré.
Maximum : 2 millisecondes ---> Correspond à un angle de rotation de 180 degrés.
Toute longueur d'impulsion intermédiaire fera tourner l'arbre du servo à son
angle correspondant. Par exemple, une impulsion de 1,5 ms correspond à un angle de rotation de 90 degrés.
Ceci sera expliqué dans la figure ci-dessous.

 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!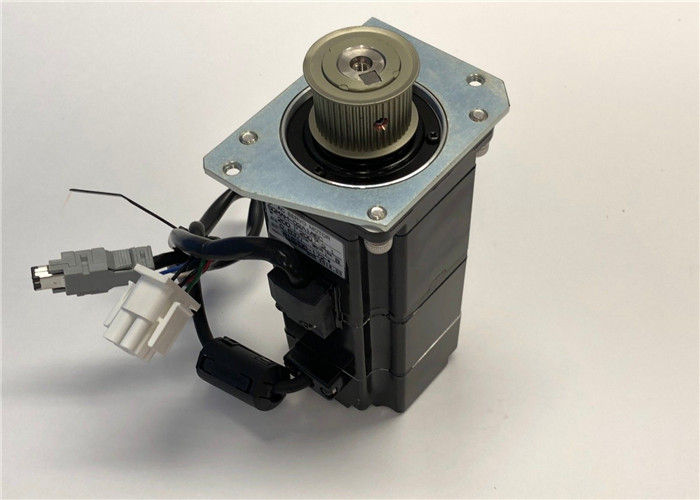
Notation globale
Capture d'écran de notation
Voici la répartition de toutes les évaluations.Toutes les critiques