Servo moteur industriel nouveau SGMPH-02AAA21 Yaskawa Electric Japan Sigma 2 (série Σ-II)
Définition
- Yaskawa électrique
- Servo moteur à courant alternatif
- Sigma 2 (série Σ-II)
Les spécifications
| Produit de fabrication |
Il s'agit de la société Yaskawa / MagneTek / Saftronics / Omron. |
| Série |
Sigma 2 (série Σ-II) |
| Le poids |
10 kilos |
Éléments de configuration
(a) Contrôleur Le contrôleur est l'hôte du réseau SynqNet. Il ne devrait y avoir qu'un seul contrôleur par réseau.
(b) Nœuds Un nœud est un esclave et non le contrôleur, sauf indication contraire.
(c) Terminator Un connecteur en boucle optionnel placé à la fin d'une chaîne de nœuds dans une topologie de chaîne.
Topologie
SynqNet prend en charge une topologie d'anneau où les nœuds réseau sont connectés en série au contrôleur SynqNet.le réseau redirigera les données de paquet autour de la pause et avisera l'application avec un événementL'emplacement de la rupture peut être déterminé par l'application.
La topologie de chaîne (ouverte ou terminée) est également prise en charge lorsque les nœuds réseau ne sont pas reliés au contrôleur SynqNet.les nœuds en aval de la rupture ne seront plus en mesure d'envoyer/recevoir des paquets vers/à partir du contrôleurL'avantage de l'utilisation d'un terminateur sur le dernier nœud est que le temps d'initialisation du réseau est réduit, car le contrôleur peut déterministiquement trouver le dernier nœud sur un réseau.Les deux types de topologie de chaîne ne prennent pas en charge la récupération de défauts.
Réponses cycliques Toutes les réponses cycliques sont reçues à chaque cycle de contrôle et sont disponibles dans le tampon de réponse des nœuds.
(1) Drive Ready Indique que les communications sont actives.
(2) Encodeur prêt Indique que le codeur série communique correctement en mode synchrone.
(3) Amp Powered Indique que la tension du moteur est disponible pour entraîner le servo.
(4) Servo ON Indique que le servo est activé ou désactivé. Ne sera pas réglé si la commande est désactivée soit en éteignant le PWM, soit par freinage dynamique.
(5) Limite de couple Indique que la référence de couple est supérieure à la limite de couple.
(6) Avertissement Avertissement selon lequel des précautions doivent être prises pour éviter un défaut ou une erreur.
(7) Erreur Indique qu'un défaut a arrêté l'amplificateur. Pour déterminer la cause du défaut, le code d'erreur doit être lu à l'aide d'une opération de mémoire. Valide à tout moment.
(8) Réaction de position Renvoie une valeur de position de 32 bits à chaque cycle de commande.
(9) Monitor_A / Torque Echo Indique que la valeur du couple est renvoyée à chaque cycle de commande.
(10) Monitor_C / Multi-turn Data Renvoie une valeur de données multi-turn de 16 bits.

Autres produits supérieurs
| Le moteur Yasakawa, le chauffeur SG... |
Je suis un homme de confiance. |
| Les modules Westinghouse 1C, 5X, |
Emerson est en train de mourir. |
| Honeywell TC, TK et TK. |
Modules génétiquement modifiés |
| Moteur de ventilation A0- |
Émetteur Yokogawa EJA- |
Produits similaires
| Le point de départ est le point de départ de l'émission. |
Le point de départ est le point de départ de l'appareil. |
| Le nombre total d'équipements utilisés pour le contrôle de la pollution atmosphérique |
Le nombre de points de contrôle doit être supérieur ou égal à: |
| Le nombre total d'équipements utilisés pour le contrôle de la pollution atmosphérique |
Le point de départ est le point de départ de l'appareil. |
| Le code de l'équipage est le code de l'équipage. |
Le nombre total d'émissions de dioxyde de carbone est estimé à: |
| Le code de conduite est le code de conduite de l'appareil. |
Le code de conduite est le code de conduite de l'appareil. |
| Le point de départ est le point de départ. |
Le code de conduite est le code de conduite de l'appareil. |
| Le nombre d'équipements utilisés est déterminé par le système de mesure. |
Le code de conduite est le code de conduite de l'appareil. |
| Le système de contrôle de l'eau doit être conforme à la présente directive. |
Le code de conduite est le code SGMPH-02BAAG161. |
| Le point de départ est le point de départ de l'appareil. |
Le système de contrôle de l'eau doit être conforme à l'annexe II. |
| Le point de départ est le point de départ de l'appareil. |
Les produits de base doivent être présentés dans un emballage de qualité supérieure. |

 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!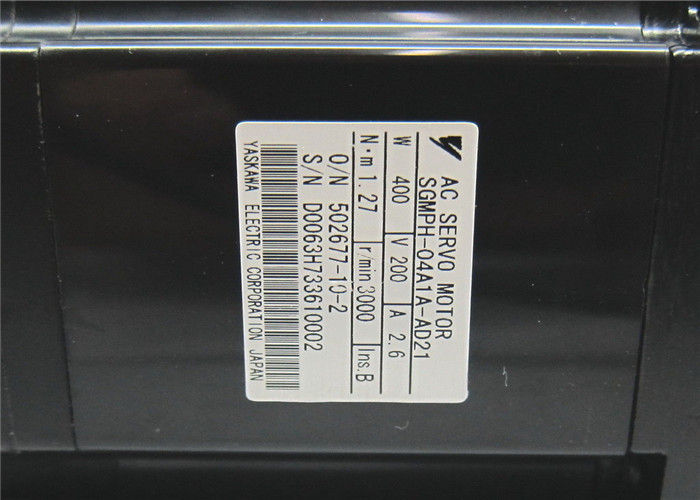
Notation globale
Capture d'écran de notation
Voici la répartition de toutes les évaluations.Toutes les critiques